Tech notes
Polarimetric Co-location Layering
A novel algorithm exploits polarimetric radar signals to filter sea clutter returns from object detections.

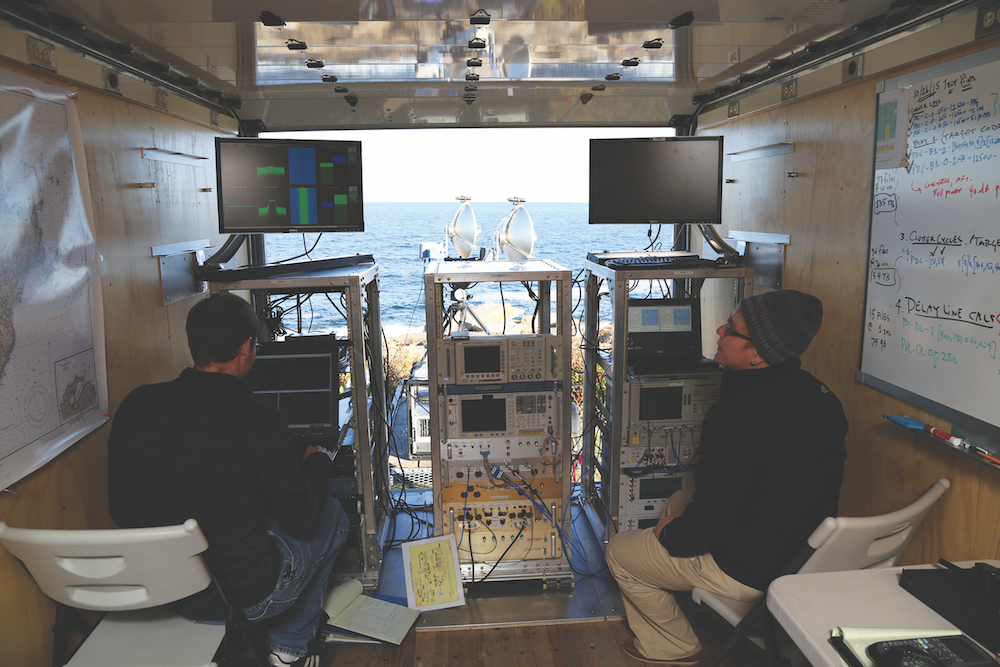 Figure 1. A team of Lincoln Laboratory researchers assembled a polarimetric radar (top) largely from commercial off-the-shelf components and collected a low-grazing-angle sea clutter dataset on the coast of Massachusetts' Cape Ann (bottom). The system was installed on a box truck and trailer for full transportability. The dataset has since been leveraged to develop an algorithm that uses radar polarimetry to mitigate low-grazing-angle sea clutter.
Figure 1. A team of Lincoln Laboratory researchers assembled a polarimetric radar (top) largely from commercial off-the-shelf components and collected a low-grazing-angle sea clutter dataset on the coast of Massachusetts' Cape Ann (bottom). The system was installed on a box truck and trailer for full transportability. The dataset has since been leveraged to develop an algorithm that uses radar polarimetry to mitigate low-grazing-angle sea clutter.Maritime radars are critical components of global commerce, transportation, and defense. Like all radars, maritime sensors emit directed electromagnetic (EM) wave energy and then measure the energy that reradiates into the sensor's receive antenna after interacting with objects in the radar scene. Consequently, radars contend with clutter—that is, energy reradiated from objects other than those for which the radar is looking. The most significant source of clutter in maritime environments is the sea itself.
The standard coherent signal processing chain maps the amplitudes and phases of measured EM waves to range-Doppler (range-velocity) space. Because of the highly dynamic nature of the sea surface, sea clutter is particularly challenging for shipborne and littoral radar systems, whose energy interacts with the sea surface at near-horizontal angles of incidence. At such low grazing angles, statistical distributions used to model sea clutter for constant false-alarm rate (CFAR) detection no longer apply. The radar trackers on maritime systems may be inundated by false alarms generated by sea clutter, and objects of interest may go undetected against the sea clutter background. Despite numerous attempts over many decades to devise a means of mitigating low-grazing-angle sea clutter, previous approaches have either been computationally impractical or lacked robustness.
Potential Solution
MIT Lincoln Laboratory is exploring the feasibility of using polarimetric radar signals to mitigate the effects of sea clutter at low grazing angles. Researchers assembled a fully polarimetric X-band radar system and collected radar measurements of the Atlantic Ocean off the coast of Massachusetts' Cape Ann in October 2015 (Figure 1). The resultant dataset spans various waveform schemes, bandwidths, sea states, and targets of opportunity. Leveraging this data, researchers developed Polarimetric Co-location Layering (PCL), an algorithm that filters detections to retain object returns while reducing sea clutter false alarms and that is able to fit directly into the radar processing chain.
The standard radar processing chain yields a set of detections in range-Doppler space over fixed time intervals called coherent processing intervals (CPIs). Each CPI's detections feed into the radar's tracker. The tracker assumes all detections are due to objects and tries to associate the incoming detections with previous detections to establish object tracks across CPIs. In the processing chain modified to include PCL, while two-dimensional CFAR detection executes on range-Doppler data in each of the horizontally polarized (HH) and vertically polarized (VV) channels, range-time intensity data used for range-Doppler generation in a given CPI is fed into PCL in parallel (see Figure 2).
Concept for Polarimetric Co-location Layering
The fundamental concept on which PCL is built is that the Doppler spectrum of the sea surface is polarization dependent. Specifically, sea surface features measured by HH radar have velocities different, on the average, from those measured by VV radar. Consequently, sea clutter detections measured by HH move at different speeds across CPIs relative to sea clutter detections measured by VV. However, the same is not true for object detections. If a point target has a signature in both HH and VV measurements, then that object will have approximately the same radial velocity with respect to the radar in both polarizations across CPIs.
The PCL algorithm leverages these principles to filter out sea clutter false alarms from the set of detections that ultimately gets passed to the tracker. At each CPI, PCL executes several steps that (1) associate pairs of detections in range across HH and VV (i.e., "polarimetric co-location") and (2) monitor displacement of detection pairs across CPIs to determine which pairs move together as time evolves. In this fashion, the algorithm differentiates between objects, which maintain polarimetric co-location across CPIs, from sea clutter, which does not. The algorithm passes only those detections deemed polarimetrically co-located across time to the tracker.
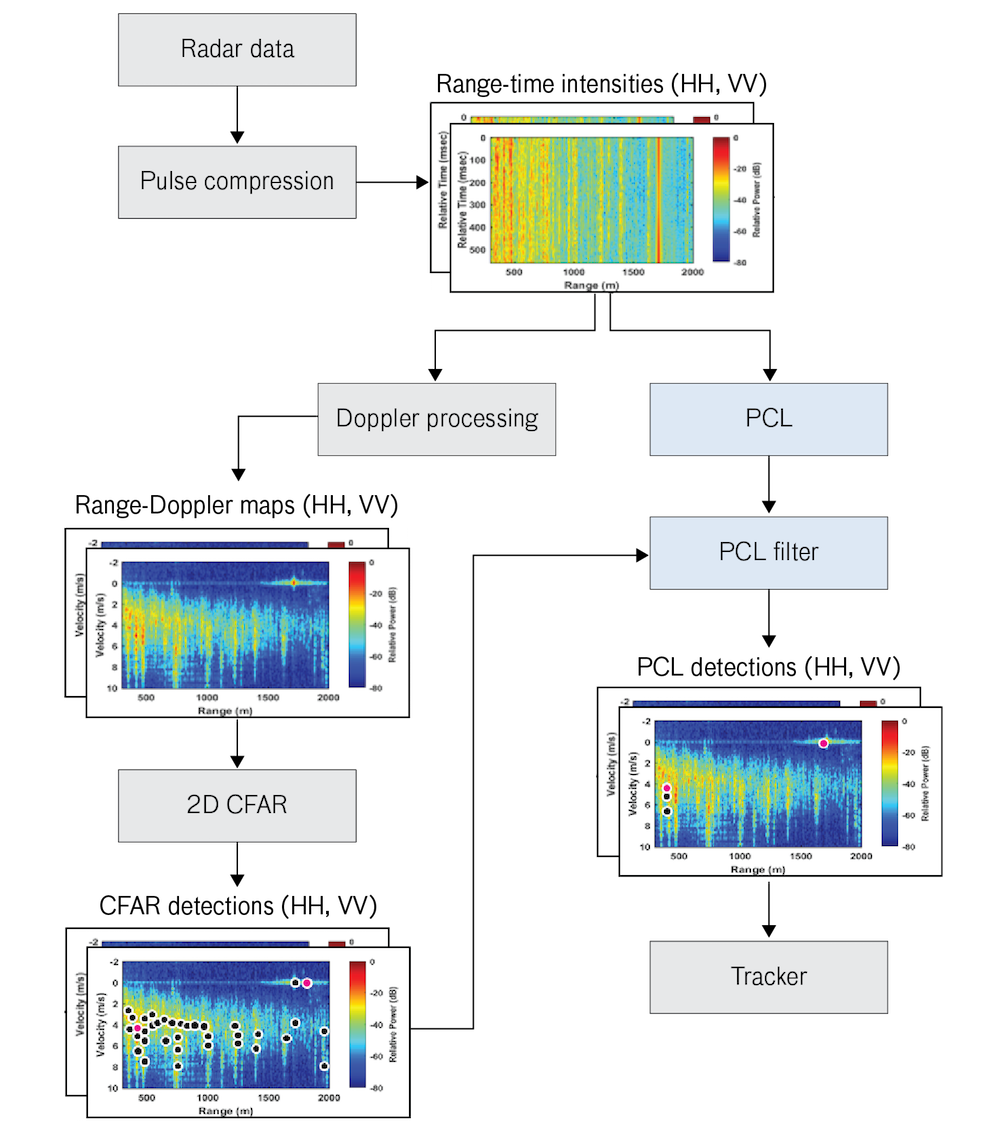 Figure 2. Polarimetric Co-location Layering (PCL) plugs directly into the standard coherent radar signal processing chain. The output of the two-dimensional (2D) constant false-alarm rate (CFAR) processing contains numerous detections, only two of which are objects (magenta circles); the rest are caused by sea clutter (black circles). As seen in the PCL detections plot, PCL filters out all but two false alarms while retaining both object detections. The algorithm's computations are done in parallel with those of 2D CFAR detection processing, maintaining the radar's near- real-time performance. (Note: HH = horizontal polarization; VV = vertical polarization.)
Figure 2. Polarimetric Co-location Layering (PCL) plugs directly into the standard coherent radar signal processing chain. The output of the two-dimensional (2D) constant false-alarm rate (CFAR) processing contains numerous detections, only two of which are objects (magenta circles); the rest are caused by sea clutter (black circles). As seen in the PCL detections plot, PCL filters out all but two false alarms while retaining both object detections. The algorithm's computations are done in parallel with those of 2D CFAR detection processing, maintaining the radar's near- real-time performance. (Note: HH = horizontal polarization; VV = vertical polarization.)Advantages of PCL
PCL reduces the standard CFAR false-alarm rate due to sea clutter by as many as two orders of magnitude while retaining object detections. PCL is also robust and practical. It not only is effective across bandwidths and sea states with both point targets and distributed objects but also plugs directly into the standard processing chain and operates with real-time efficiency. Furthermore, PCL demonstrates that, for maritime applications, radars capable of measuring HH and VV polarizations offer a significant performance improvement over that of single-polarization radar.
Future Directions
PCL's performance has been quantified over the October 2015 dataset, which comprises measurements taken in X-band for look directions within 45 degrees of upwind. Because sea clutter is dependent upon radar wavelengths and look directions, the Lincoln Laboratory team expects that an even more expansive dataset encompassing multiple wavelengths and look directions will lead to the validation of PCL across the full range of sea clutter's dependencies.
While polarimetric radar systems are more complex and costly to design and field, these considerations must be weighed against the capability gained by using PCL as an operational solution to the 70-year-old problem of mitigating low-grazing-angle sea clutter. By providing the ability to better monitor the dynamic seascape, PCL may become a key component in the processing chain on future maritime radars.
Posted December 2016
top of page